Micro-UAV made and tested for warehouses.
Rescue missions, military applications, firefighting missions, industrial automation, and other current concerns are all increasingly benefiting from multi-robot systems. One such problem statement where the practicality of using multiple robots far exceeds using one, is the mapping of large unknown environments. To avoid a negative impact on the benefits, multiple robots must not go over the same area, and hence must be able to communicate effectively. As a fail-safe measure in case of failure of the central node, this communication must be decentralized, and we have presented a blockchain based approach for the same.
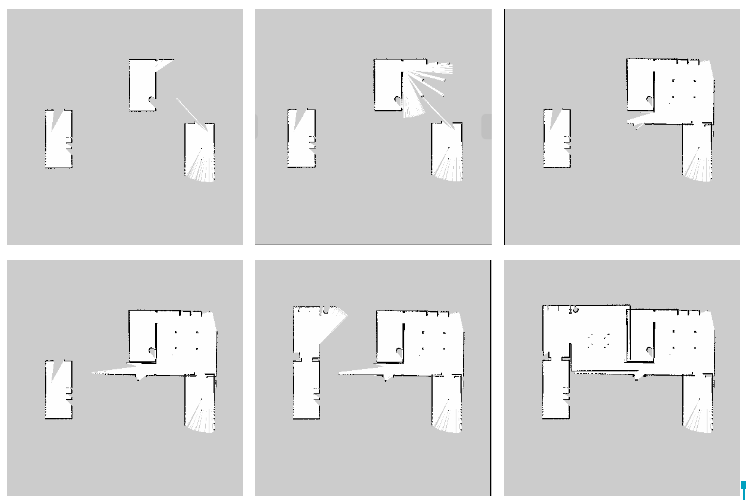
All possible explored paths (left) and final chosen path (right)
Paper accepted for presentation at Blockchain Applications in Robotics and Automation, IROS 2021