Gokul Puthumanaillam
PhD Student, Roboticist and C++ enthusiast
| About | Projects | Publications | Random |
This website looks best on a larger screen.
Make no little plans. They have no magic to stir men's blood and probably themselves will not be realized
Projects
There was a time when hackathons and robotics competitions were my playground—and to some extent, they still are. These days, though, my focus has shifted more toward academic research projects, which are just as thrilling in their own way. I’ve always loved building innovative and impactful projects, and I’ve been fortunate to collaborate with some incredible teams and mentors along the way. Here’s a glimpse at some of the work I’ve been part of.
Categories for easy scanning:
| Research | Open-source | Competition |
| Research | Open-source |
| Competition |
Clicking on an item toggles further information.
GUIDed agents Reasoning with task-specific uncertainty.
Robots performing navigation tasks in complex environments face significant challenges due to uncertainty in state estimation arising from sensor noise, environmental changes, and incomplete information. Effectively managing this uncertainty is crucial, but the optimal approach varies depending on the specific details of the task: different tasks may require varying levels of precision in different regions of the environment. For instance, a robot navigating a crowded space might need precise localization near obstacles but can operate effectively with less precise state estimates in open areas. This varying need for certainty in different parts of the environment, depending on the task, calls for navigation policies that can adapt their uncertainty management strategies based on task-specific requirements.
In this paper, we present a framework for integrating task-specific uncertainty requirements directly into navigation policies. We introduce the concept of a Task-Specific Uncertainty Map (TSUM), which represents acceptable levels of state estimation uncertainty across different regions of the operating environment for a given task. Using TSUM, we propose Generalized Uncertainty Integration for Decision-Making and Execution (GUIDE), a policy conditioning framework that incorporates these uncertainty requirements into the robot's decision-making process.
We find that conditioning policies on TSUMs not only provides an effective way to express task-specific uncertainty requirements but also enables the robot to reason about the context-dependent value of certainty and adapt its behavior accordingly. We show how integrating GUIDE into reinforcement learning frameworks allows the agent to learn navigation policies that effectively balance task completion and uncertainty management without the need for explicit reward engineering. We evaluate GUIDE at scale on a variety of real-world robotic navigation tasks and find that it demonstrates significant improvements in task completion rates compared to baseline methods that do not explicitly consider task-specific uncertainty.
Paper: ArXiv
Code and Videos: https://guided-agents.github.io
TAB-Fields A Maximum Entropy Framework for Mission-Aware Adversarial Planning.
Autonomous agents operating in adversarial scenarios face a fundamental challenge: while they may know their adversaries' high-level objectives, such as reaching specific destinations within time constraints, the exact policies these adversaries will employ remain unknown. Traditional approaches address this challenge by treating the adversary's state as a partially observable element, leading to a formulation as a Partially Observable Markov Decision Process (POMDP). However, the induced belief-space dynamics in a POMDP require knowledge of the system's transition dynamics, which, in this case, depend on the adversary's unknown policy. Our key observation is that while an adversary's exact policy is unknown, their behavior is necessarily constrained by their mission objectives and the physical environment, allowing us to characterize the space of possible behaviors without assuming specific policies. In this paper, we develop Task-Aware Behavior Fields (TAB-Fields), a representation that captures adversary state distributions over time by computing the most unbiased probability distribution consistent with known constraints. We construct TAB-Fields by solving a constrained optimization problem that minimizes additional assumptions about adversary behavior beyond mission and environmental requirements. We integrate TAB-Fields with standard planning algorithms by introducing TAB-conditioned POMCP, an adaptation of Partially Observable Monte Carlo Planning. Through experiments in simulation with underwater robots and hardware implementations with ground robots, we demonstrate that our approach achieves superior performance compared to baselines that either assume specific adversary policies or neglect mission constraints altogether.
Paper: ArXiv
Code and Website: https://tab-fields.github.io
ComTraq-MPC Learning and planning in budget-aware environments.
Optimal decision-making for trajectory tracking in partially observable, stochastic environments where the number of active localization updates are limited, presents a significant challenge. Traditional methods often struggle to balance resource conservation, accurate state estimation and precise tracking, resulting in suboptimal performance. This problem is particularly pronounced in environments with large action spaces, where the need for frequent, accurate state data is paramount, yet the capacity for active localization updates is restricted by external limitations. This paper introduces ComTraQ-MPC, a novel framework that combines Deep Q-Networks (DQN) and Model Predictive Control (MPC) to optimize trajectory tracking with constrained active localization updates. The meta-trained DQN ensures adaptive active localization scheduling, while the MPC leverages available state information to improve tracking. The central contribution of this work is their reciprocal interaction: DQN's update decisions inform MPC's control strategy, and MPC's outcomes refine DQN's learning, creating a cohesive, adaptive system. Empirical evaluations in simulated and real-world settings demonstrate that ComTraQ-MPC significantly enhances operational efficiency and accuracy, providing a generalizable and approximately optimal solution for trajectory tracking in complex partially observable environments.
Paper: ArXiv
Code: GitHub
Time-Varying POMDPs Learning and planning in time-varying environments.
Optimal decision-making presents a significant challenge for autonomous systems operating in uncertain, stochastic and time-varying environments. Environmental variability over time can significantly impact the system's optimal decision making strategy for mission completion. To model such environments, this work combines the previous notion of Time-Varying Markov Decision Processes (TVMDP) with partial observability and introduces Time-Varying Partially Observable Markov Decision Processes (TV-POMDP). This project proposes a two-pronged approach to accurately estimate and plan within the TV-POMDP: 1) Memory Prioritized State Estimation (MPSE), which leverages weighted memory to provide more accurate time-varying transition estimates; and 2) an MPSE-integrated planning strategy that optimizes long-term rewards while accounting for temporal constraint. Our results demonstrate superior performance over standard methods, highlighting the framework's effectiveness in stochastic, uncertain, time-varying domains.
Paper: ArXiv
I am an amateur in video editing, but I try :)
PINN-MPC Formal verification of Physics Informed Neural Network Controlled Systems
Ensuring safe and efficient navigation of autonomous robots in complex real-world environments is a critical challenge. This work presents a novel approach that combines Physics-Informed Neural Networks (PINNs) with Model Predictive Control (MPC) and formal verification techniques to enable provably safe navigation of the TurtleBot Burger mobile robot. The proposed PINN-MPC framework learns the robot's dynamics from data while respecting physical constraints and integrates formal verification to provide safety guarantees on the generated control actions.
We introduce an iterative verification procedure that leverages reachability analysis and the Reluplex neural network verification tool to ensure that the PINN-MPC system generates control actions that satisfy safety requirements, such as collision avoidance and adherence to velocity limits, over a finite time horizon. The approach is evaluated through extensive experiments in both sparse and cluttered environments, demonstrating significant improvements in navigation safety, efficiency, and smoothness compared to baseline methods. We demonstrate the performance of our approach on hardware robot showing that the formally verified PINN-MPC achieves a 100% success rate in the sparse environment and a 96% success rate in the cluttered environment, with no collisions.
Find the paper here: PDF
Assured Collision Avoidance for Learned Controllers.
This work introduced a novel approach to verification of neural network controlled systems, combining the capabilities of the nnenum framework with the Verse toolkit. Addressing a critical gap in the traditional verification process which often does not include the system dynamics analysis while computing the neural network outputs, our integrated methodology enhances the precision and safety of decision-making in complex dynamical systems. By iteratively verifying neural network decisions and propagating system states, we maintain an accurate representation of the system’s behavior over time, a vital aspect in ensuring operational safety. Our approach is exemplified through the verification of the neural network controlled Airborne Collision Avoidance System for Unmanned Aircraft (ACAS Xu). We demonstrate that the integration of nnenum and Verse not only accurately computes reachable sets for the UAS but also effectively handles the inherent complexity and nonlinearity of the system. The resulting analysis provides a nuanced understanding of the system’s behavior under varying operational conditions and interactions with other agents, such as intruder aircraft. The comprehensive simulations conducted as part of this study reveal the robustness of our approach, validating its effectiveness in verifying the safety and reliability of learned controllers. Furthermore, the scalability and adaptability of our methodology suggest its broader applicability in various autonomous systems requiring rigorous safety verification.
Paper: ArXiv
Video coming soon! (I am an amateur in video editing, but I try :) )
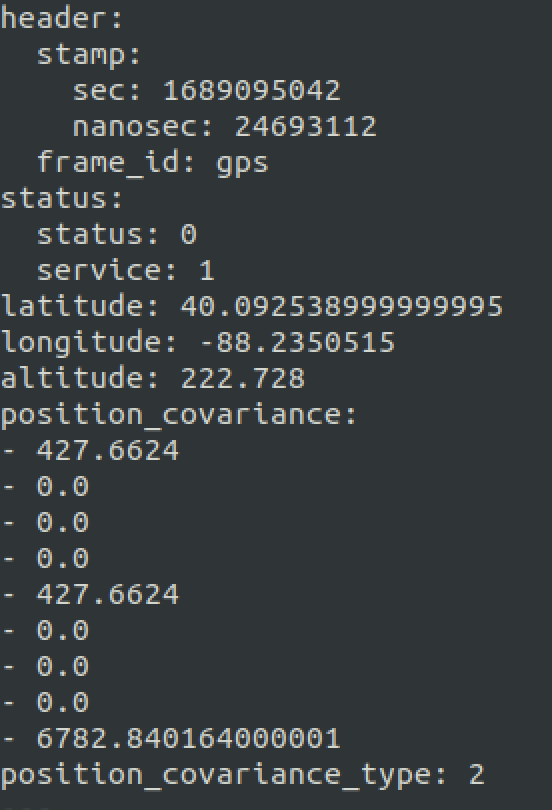
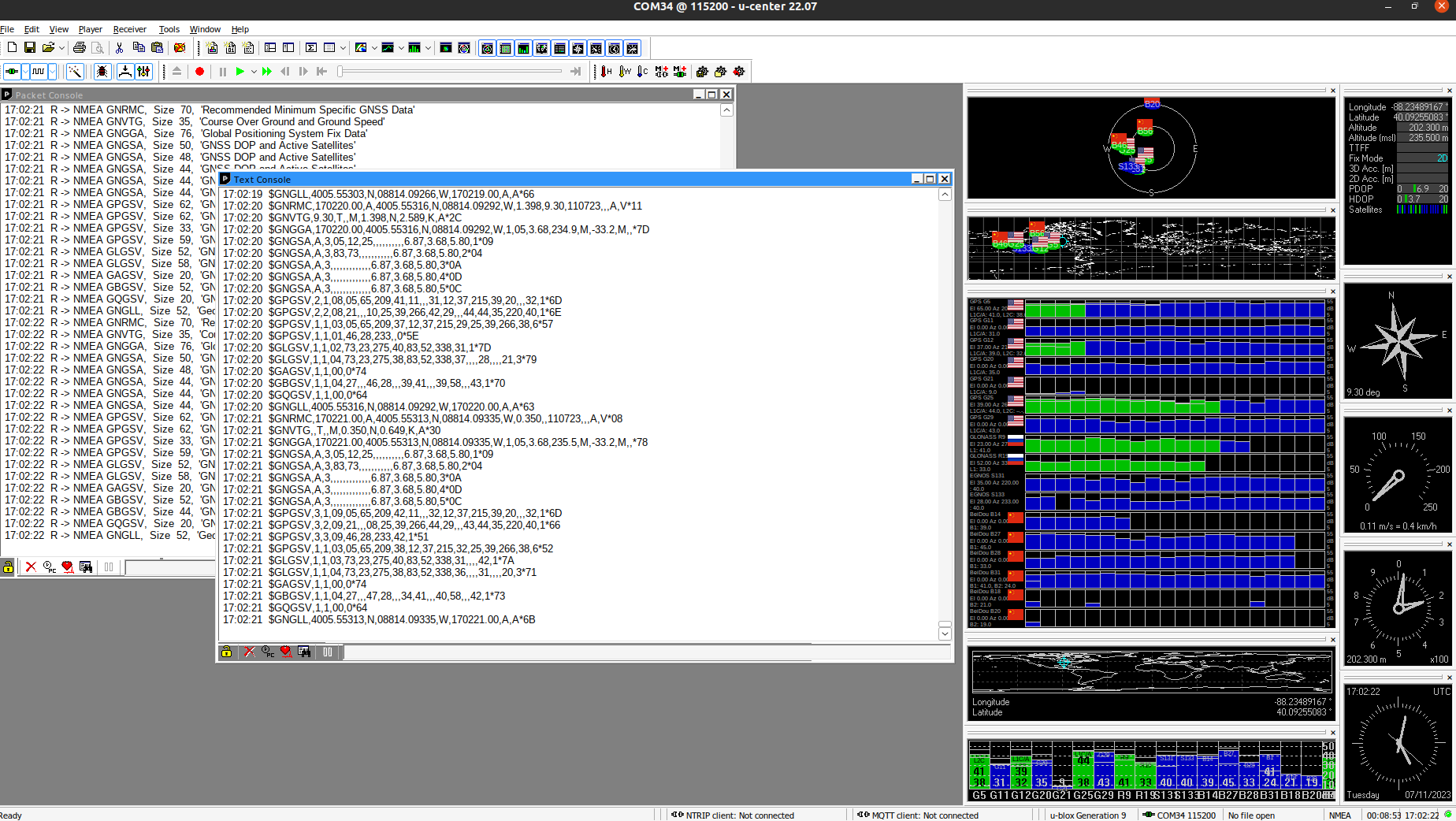
ROS2-UBlox-ZedF9P ROS2 drivers for u-blox ZED F9P GPS receivers.
This project provides ROS2 support for u-blox ZED F9P GPS receivers.
Most of this driver has been written based off the original ROS(1) driver that can be found here.
Features:
- Fast and robust
- Tested only for serial connections
- Can play back PCAP capture logs to test behavior
- Easy to add support for more log types
- Supports ASCII and binary-format logs
- Can synchronize
BESTPOS,BESTVEL, andPSRDOP2logs together in order to produce gpscommon/GPSFix messages - Can produce IMU data from receives with SPAN support
Code repository:
Feel free to browse and access the software stack: https://github.com/gokulp01/ros2-ublox-zedf9p
MQL Humanoid Meta QLearning experiments to optimize robot walking patterns.
Implemented Meta-Q-Learning for optimizing humanoid walking patterns. The project also demonstrate its effectiveness in improving stability, efficiency, and adaptability. Additionally, this work also explores the transferability of Meta-Q-Learning to new tasks with minimal tuning.
Conducted experiments: Test how adaptable the humanoid is by performing:
- Side stepping
- Ascending and Descending
Code repository: Feel free to browse and access the software stack: https://github.com/gokulp01/meta-qlearning-humanoid
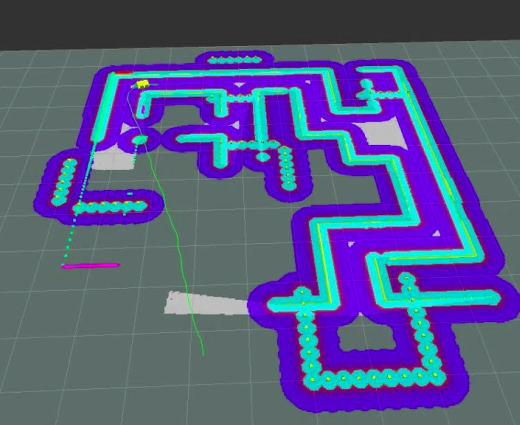
RIP Reachability based (Ri)sk Aware (P)lanner.
RiP is a reachability based behavioural planner that prioritizes certain behaviour over the other. In this case, the priority order being:
- No interaction with the "Danger" zone
- Total length of the trajectory<constant (100)
- Minimize the time spent in "Risk" zone
- Minimize the total path length
(This order of the can be rearranged to get different results.)
The risk is minimized by assigining risk boundaries around the obstacles and then optimizing the path for length as well as risk. This algorithm is most suited for cases where the obstacles are adverserial and missions where safety is of utmost priority.
All possible explored paths (left) and final chosen path (right)
Code repository: Feel free to browse and access our software stack: http://github.com/gokulp01/RiP-Planner
More on the project and its documentation is in works. Coming soon!
EVE (Making) India's First Fully Autonomous Car.
Eve is our entry into the Mahindra $1 million challenge.

It is the culmination of years of hard work and is packed with cutting edge technologies and techniques – made even more impressive as we were the youngest team to qualify for the finals.
I had been heading the Sensing division of the team working towards building Eve. We got the car to level 2-3 autonomy. Extensively contributed in the areas of firmware, sensor fusion, planning and control, amongst other things for Indian road conditions.
*Code repository: * Feel free to browse and access our software stack:
*Recognition: * We have been invited by tech giants like SAP, Continental, Vector and reputed colleges like NIE Mysore to present and give talks on our work.
Sponsors
- Microsoft
- Nvidia
- Gigabyte
- Continental
- Bossard
- Mahindra Rise
- Sick
- Vector
- Pepperl+Fuchs
- Ximea
- Cooler Master
- National Instruments and many more :)
MBZIRC The Maritime Grand Challenge.
Robots and other autonomous systems are increasingly being adopted in diverse fields – from health care and security to transport and manufacturing – as they become cheaper and smarter.
However, a significant gap exists between the current reality of robotic capabilities and real-world requirements. The MBZIRC Maritime Grand Challenge, was aimed on finding a practical solution to global maritime security challenges such as illegal fishing, piracy, smuggling and human trafficking.
It involved the developemnt of a heterogeneous collaboration among unmanned aerial vehicles and unmanned surface vehicles to perform complex navigation and manipulation tasks in a GNSS- denied marine environment.
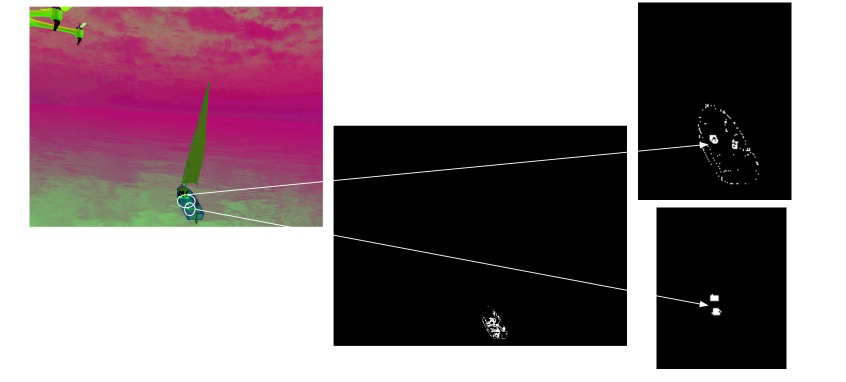

Modified descriptor extractor and high level architecture(right)
Code repository:
Software stack(request access): https://github.com/MOONLABIISERB/MBZIRC2023
SOLO Intelligent Ground Vehicle Challenge 2019.
Never Heard of Solo? It’s the UGV that made the headlines at IGVC in less than twelve months after its predecessor Adam’s entry.
Grand Prize winners and won the Lescoe Cup at IGVC, an international level robotics competition held at Oakland University, Michigan, USA.

Code repository and Report:
- Software stack: https://gitlab.com/project-manas/ai/igvc_2019
- Publications, Report: https://bit.ly/3pOx2Vf
- Feel free to mess around with the simulations: https://projectmanas.in/solo
Awards won:
- Interoperability Challenge-1st
- Design Challenge-2nd
- Cybersecurity challenge-3rd
- Grand prize winners- Lescoe cup
SERAPHIM Student Unmanned Aerial Systems Competition (SUAS).
SERAPHIM is a system consisting of a fully autonomous drone and an autonomous Unmanned Ground Vehicle which was our entry to the Student Unmanned Aerial Systems Competition (SUAS) organized by the Association for Unmanned Vehicle Systems International (AUVSI).

The UAV was made keeping in mind a series of tasks that should be completed by the UAS system built:
- Interoperability: The UAS could download mission details, upload aircraft telemetry in real time, and upload mission deliverables to an external networked system.
- Autonomous Flight: The UAS autonomously takes off, flies within boundaries, navigates a series of waypoints, and lands.
- Obstacle Avoidance: The UAS autonomously avoids obstacles, which can be stationary or moving.
- Object Detection, Classification, Localization: The UAS takes pictures of a search area, detects objects of interest, classifies its characteristics, and provides a GPS position.
- Mapping: The UAS takes pictures of an area of interest and stitches the imagery into a map.
Air Delivery. The UAS autonomously drops a payload object so that it lands undamaged at a provided GPS position.
KOBU Extraterrestrial multi-robot planner.
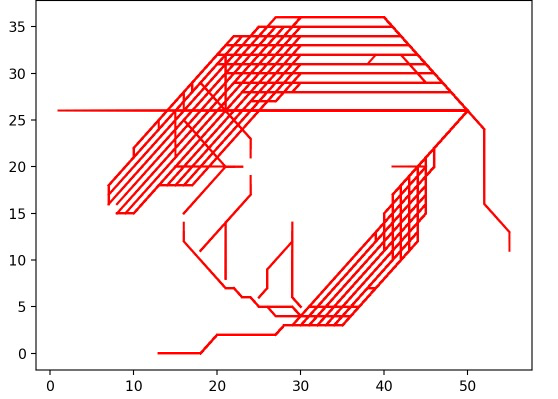
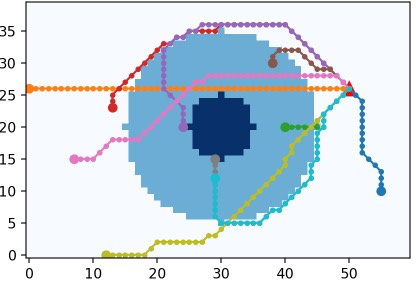
Multi-robot teams have been used for a variety of navigation and mapping applications. They have proven to provide better time efficacy and output than using a singular robot in doing the same. A place where such an implementation may have a lot of potential is in the exploration of planets and other similar terrestrial bodies, which is what this study aims to focus on. With space research thriving more than ever, a decentralized multi-robot system has the potential to deliver results many more times than a single ground robot would.
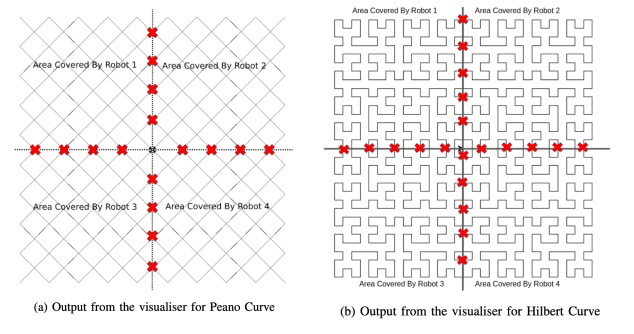
This paper introduces an optimized space-filling technique and tries to achieve autonomous multi-robot navigation without any path overlap.
Code repository and Report:
- Software stack: https://github.com/raghavthakar/kobu
- Publications, Report: https://github.com/raghavthakar/kobu/blob/main/kobu.pdf
- Watch it in action here: https://www.youtube.com/watch?v=NxmvM7g0AX4
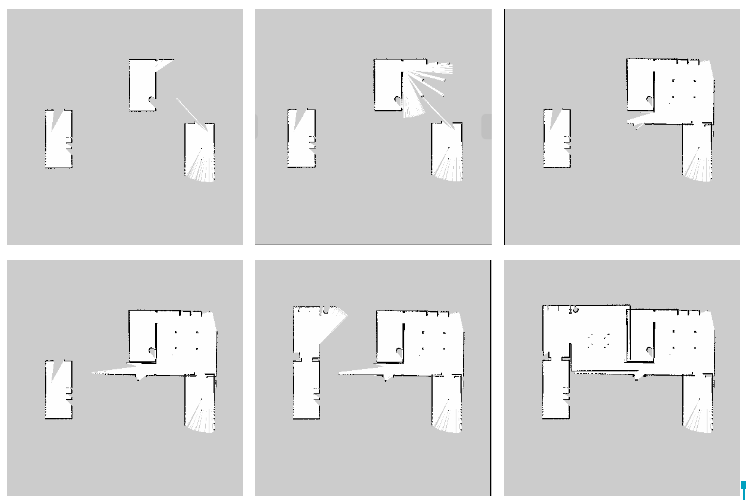
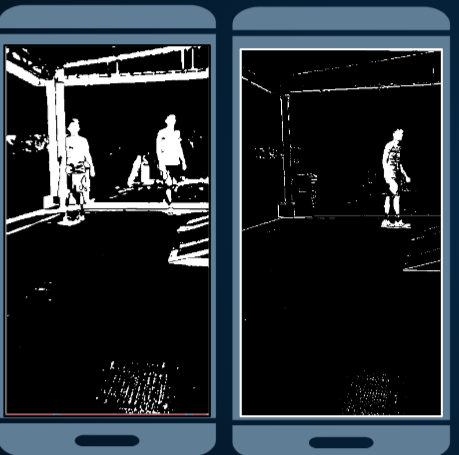
Oh-SLAM Object SLAM based indoor localisation in cluttered environment.
Advisor: Dr. Sujit PB, Multi Robot Autonomy Lab Undergraduate researcher at the Multi-Robot Autonomy(M00N) Lab working on the topic of Object SLAM and sensor fusion based indoor localisation in cluttered environment.
Worked with Prof. Sujit PB(IISER-B) and Prof. Madhava Krishna(IIIT-H) to develop a novel monocular 2D Object Aware SLAM for navigation in indoor environments. Used meta-learning based approach alongside an EKF to fuse the values from the GNSS and the IMU, we were able to show that we can better the results of classical localization methods without significant computational resources.
Currently, I am also leading the navigation stack for the team competing at the MBZIRC. The main problem statement is to localize and search for a target using a heterogeneous swarm comprising of a USV, multiple UAVs and fixed wings in a GNSS denied environment. We are extrapolating the results obtained in the previously developed navigation pipeline for the swarm. To know more about the MBZIRC project, please check out the MBZIRC section.
Paper under preparation.
Bubo Micro-UAV made and tested for warehouses.
Bubo is a UAV made and tested for warehouses. Bubo took part in the Flipkart Grid 2.0 and reached the penultimate round of the competition


Named after Bubo, from Clash of the Titans our UAV is a tested and perfected warehouse assistant UAV with the following capabilities:
- Pick up/drop loads to a specific location
- Video surveillance
- Cycle Counting (Barcode & RFID)
- RTH(at low battery)
- Intralogistics (online mapping)

All possible explored paths (left) and final chosen path (right)
Blockmapping Micro-UAV made and tested for warehouses.
Rescue missions, military applications, firefighting missions, industrial automation, and other current concerns are all increasingly benefiting from multi-robot systems. One such problem statement where the practicality of using multiple robots far exceeds using one, is the mapping of large unknown environments. To avoid a negative impact on the benefits, multiple robots must not go over the same area, and hence must be able to communicate effectively. As a fail-safe measure in case of failure of the central node, this communication must be decentralized, and we have presented a blockchain based approach for the same.
All possible explored paths (left) and final chosen path (right)
Paper accepted for presentation at Blockchain Applications in Robotics and Automation, IROS 2021
Tri-Plan Dynamic area approximation based stochastic multi-UAV path planner.
This work presents a novel approach to effectively search for a target using a multi-robot system. The proposed approach augments the conventional swarm-based stochastic search algorithms by dynamically refining the search space to locate the source. Compared to other search algorithms, including PSO, Cuckoo Search Algorithm, Bat Algorithm, Glowworm Swarm Optimization and Random Walk, our algorithm reduces the time taken, and the amount of exploration done is much more succinct. Similarly, the algorithm makes no concessions in terms of success rate. In extreme scenarios, when the number of particles is fewer than five, the search space is enormous, or the search space is unbounded or noise in the sensor readings, our method stands out and performs far better than its competitors.
All possible explored paths (left) and final chosen path (right)
Paper under review
Baymax A really cool robot that won ROScore.
Baymax is a robot that won RosCore, a national level robotics competition.

BayMax is a really cool mobile robot that was made in 5 hours (4 hours and 37 minutes to be precise). It went on to win RosCore, a national level competition which involved designing the robot with capabilities of navigating, localising and planning its way through a maze while also parallely performing vision based tasks(scanning AR codes and solving them).
Feel free to browse through the source code: https://bitbucket.org/gokulp01/baymax/src/master/
Full-stack pipeline for self-driving car test-bed.
Advisors: Prof. Keyvan Hashtrudi-Zaad, Prof. Joshua Marshall
- Worked with the research team on the SAE AutoDrive II Challenge
- Implemented a full-stack pipeline for self-driving car test-bed, which includes:
- A complete simulation of the map and environment in Carla.
- Perception and planning stack comprised of route planning, prediction, behavioural planning and path generation
- NMPC based controller for the ego vehicle, a Reciprocal Velocity Obstacles based controller for the traffic fleet, an adaptive behavioural planner with a dynamic velocity profiler.
Unscented Kalman filter based sensor fusion for sensors including Lidar, GPS, IMU and Encoders. The work is still in progress and is expected to be completed by September.


Nuerovision A tool to detect hypokalemic paralysis and partial paralysis.
Detecting hypokalemic paralysis and partial paralysis using computer vision. Status: Completed
Mentor: Dr. Bhargav Bhatkalkar Team Members: Gokul, Dhruva, Riyaadh
More than 10 Million People around the globe are affected by Parkinson’s Disease. 1 in every 15 people suffering from Parkinson’s Disease experience partial paralysis which if not treated at the right time can be very dangerous.
Worked on NeuroVision, a tool to detect hypokalemic paralysis and partial paralysis using state of the art computer vision techniques. NeuroVision uses Computer Vision and Deep Learning algorithms to detect if a patient is in a state of paralysis. NeuroVision revolves around making the solution as cheap and feasible for anyone to use.
Report: Feel free to go through our product pitch: https://drive.google.com/file/d/1O-7xuAecCF_Ev9lRXNjB5UbMr4e1wMJ6/view?usp=sharing
Awards and recognition:
- 2nd Place in the MIT Health Hackathon.
- Placed 2nd in the country at the Coursera Innovation challenge 2021
- Mentored by Adam McGowan, a consultant for early-stage ventures to help the team explore the possibilities of commercialising the product.
H4rdWeared Manet based communication and monitoring system for soldiers.
H4rdWeared was presented at the Smart India Hackathon under DRDO’s(Defence Research and Development Organisation) problem statement. H4rdWeared was designed a wearable strap for soldiers with the following features:
- GPS location tracking of the soldier
- Monitor and record maximum number of vital body parameters
- SoS facility.
- Supports location timeline
- Transfers information by using a MANET-type communication system
- BrainFlex integration to monitor the brainwaves of different frequencies and log the soldier’s mental health
Awards and Recognition:
One of the top 5 teams to make it to the national level finals Finals was called off because of the pandemic :(
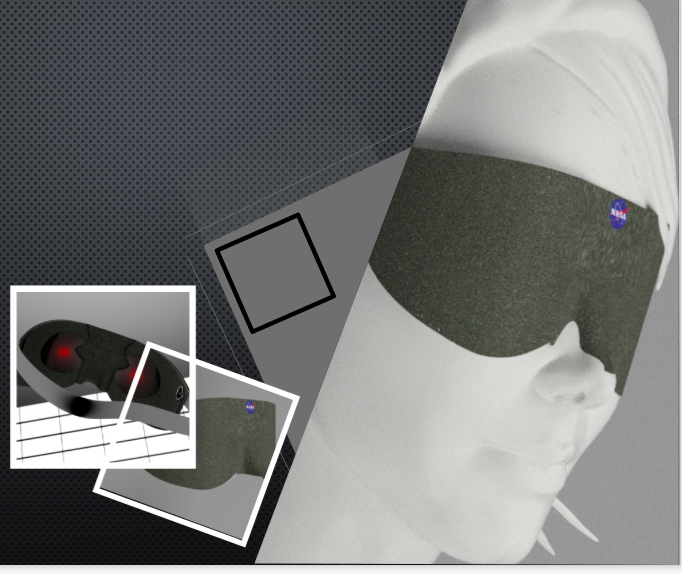
Cosmorepophilia An operational sleep shift scheduling tool for astronauts.
Developed Cosmorepophilia, an operational sleep shift scheduling tool for the NASA Space Apps Challenge
Sleep loss and fatigue may lead to reduced performance and an increased risk to safety during many activities, including spaceflight. Our challenge was to develop an operational sleep shift scheduling tool that provides autonomous customization of a schedule for sleep, exercise, and nutrition to manage fatigue.
Cosmorepophilia provides autonomous customization of a schedule for sleep, exercise and nutrition to manage fatigue especially in astronauts. Cosmorepophilia also includes Cosmorepose, an innovative yet simplistic design of sleep mask, incorporated with some of the consummate technologies to ensure absolute and austere sleep for the cosmic travellers. The design houses vital sleep inducing red light therapy techniques put forth by some of the leading prolific researchers and sleep specialists. Due to the incorporated flexi – PCB, actively measuring significant human sensory organs, users can monitor and get customized Regenerative Learning solutions, aiding them in getting a titillating sleep experience.
Awards and Recognition:
- Global nominees
- People’s Choice Award
- Presented our paper titled Cosmorepophilae- an interstellar circadian rhythm synchronizer and sleep scheduling mechanism for deep space travellers at the Space Habitat Conference 2020.
- Software Stack: The github repo will soon be made publicly available post paper acceptance.
Zeoco A cool app to save a hot planet.
Zeoco revolves around the idea of quantifying the implicit effect of consuming a product or utility concerning the associated carbon footprint index.
Mentor: Ali De Jong, Apple Inc [USA]
![]()
Climate change, which is now considered one of the biggest threats to humanity, is also the reason behind various other environmental concerns. Continued negligence might lead us to an irreparably damaged environment. After the partial failure of the Paris Agreement, it is quite evident that we as individuals need to come together to bring about a change on a large scale to have a significant impact. This project discusses our approach towards obtaining a realistic measure of the carbon footprint index being consumed by a user through day-to-day activities performed via a smartphone app and offering incentives in weekly and monthly leader board rankings along with a reward system.
The app helps ease out decision makings on tasks like travel, shopping, electricity consumption, and gain a different and rather numerical perspective over the daily choices.
Code repository and report: Feel free to access our project using the given links:
Report: ArXiv
Source Code: https://github.com/L3thal14/Zeoco
Crack A modern computer.
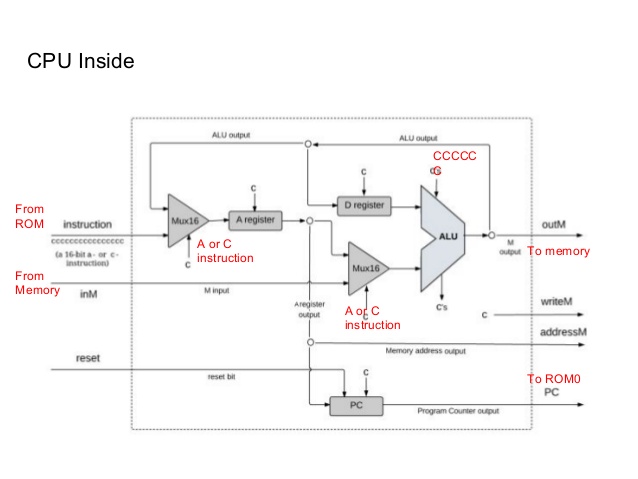
Built Crack, a completely functional modern computer based on Hack.
Crack is a modern computer built from scratch using HDL from first principles which can handle assembly-level codes or machine level codes and execute them accordingly. The results were significantly good and the computer could handle games like pong which were written in a low level language.